Blog
Stay up to date with the multimedia landscape
Expert technical analysis on GStreamer pipelines, video codecs, and the future of AI-driven media processing.
Most Recent Posts

Benchmarking Remote Desktop Coding Tools for DaaS & VDI
daas-vdi, codecs, gstreamer, optimization, the-lab, remote-desktop-coding-tools, lynxWe used an automated benchmarking workflow to evaluate Fluendo’s Remote Desktop Coding Tools against common codec references for screen-content streaming, measuring compression efficiency, CPU cost, frame delay, and desktop-content suitability.
Real-time face avatarization: identity swapping on the edge
broadcasting, video-surveillance, multimedia-edge-ai, application-development, outsource
Face anonymization with real-time re-identification
broadcasting, video-surveillance, multimedia-edge-ai, application-development, outsource
Browse by
All
Categories
Industries
Products
Research-Initiatives
Services
Technological-Projects
Technologies
Announcements
Events
Open-Source
The-Lab
Broadcasting
DaaS & VDI
Sports
Video Surveillance
AC-4 Decoder
Anonymizer
Directshow-Enabler
FFmpeg Enabler
FFmpeg Enabler + Dolby Professional
Fluendo AI Plugins
Fluendo Codec Pack
Fluendo-Hbbtv-Sdk
Fluendo-Media-Center
H.266/VVC
Longomatch
Moovida
Oneplay-Codec-Pack
Oneplay-Dvd-Player
Remote Desktop Coding Tools
Beaver
Cheetah
Lynx
Owl
Raven
Bug Fixing
Guidance
Optimization
Outsource
Staff Augmentation
Training
Upstreaming
Ai-Engine
Flu-Plugins-Oss
Application Development
Browsers
Codecs
GStreamer
Multimedia Edge AI
Benchmarking Remote Desktop Coding Tools for DaaS & VDI
daas-vdi, codecs, gstreamer, optimization, the-lab, remote-desktop-coding-tools, lynxReal-time face avatarization: identity swapping on the edge
broadcasting, video-surveillance, multimedia-edge-ai, application-development, outsourceFace anonymization with real-time re-identification
broadcasting, video-surveillance, multimedia-edge-ai, application-development, outsource
From H.265 to H.266: evaluating our new fluh266enc
gstreamer, codecs, fluendo-codec-pack, h266-vvc
GStreamer training: streamlining development for agile collaboration
military, gstreamer, training
GStreamer spring hackfest 2026
gstreamer, codecs, browsers, events, open-source
WebTransport support in GStreamer
gstreamer, codecs, browsers
Bringing Dolby AC-4 to GStreamer: the journey to decoding
gstreamer, codecs, upstreaming, the-lab, open-source, ac4-decoder, ffmpeg-enabler-dolby-professional
Beyond vibe coding: Scaling AI software architecture with spec-driven development
broadcasting, application-development
Securing Video Pipelines: Digitally Signed Content (DSC) Support in GStreamer
broadcasting, software-security, video-surveillance, codecs, gstreamer, outsource
Multimedia content authenticity and provenance
Gst-Audit: The instrumentation tool for your pipelines
gstreamer, open-source, events, beaver
Enhancing video quality assessment in GStreamer - Encoder statistics and VMAF integration
codecs, gstreamer, outsource
From GStreamer Web APIs to C2PA: 5 Projects from our latest Innovation days
events
Fluendo at the Core of GStreamer 1.28.0: Leadership in ORC and video quality measure with VMAF
gstreamer, open-source
Fluendo at MWC Barcelona 2026: Multimedia solutions for 5G, edge and telecommunications

IA-Veu building legal, ethical, and trustworthy AI voice technology in Catalan
multimedia-edge-ai
Fluendo at ISE 2026: Solutions for the professional AV industry
bug-fixing, guidance, optimization, outsource, staff-augmentation, training, upstreaming
Fluendo at GStreamer Conference 2025 in London
gstreamer, events, open-source, owl
Fluendo x Intelion: Low-latency live video streaming and recording for law enforcement
broadcasting, application-development, gstreamer, outsource
Enhancing mobile video playback: Lessons from a real-world GStreamer project
ai, software-services, gstreamer, multimedia-edge-ai, application-development, codecs, bug-fixing
Next Stop: GStreamer Conference 2025 in London, UK
gstreamer, events, open-source
A month after IBC 2025: Inspired and ready for what’s next

Advertisement detection in multimedia content with artificial intelligence
broadcasting, multimedia-edge-ai, application-development, outsource
Fluendo AI Plugins v1.0.4: The power of real-time AI anonymization
fluendo-ai-plugins, anonymizer
Real-time 4K face anonymization benchmark (GStreamer plugin)
broadcasting, video-surveillance, automotive, multimedia-edge-ai, gstreamer, events, fluendo-ai-plugins, anonymizer, raven
Virtual avatars optimized for AMD GPUs in video games
hardware-manufacturer, multimedia-edge-ai, gstreamer, outsource, raven
Alpha channel support for VVC/H.266 in vvenc and GStreamer
government, codecs, gstreamer, outsource
Intelligent parking spot occupancy detection
automotive, multimedia-edge-ai, optimization
Fluendo's STREAM project: Final results from SPIRIT Open Call
government, gstreamer, codecs
Recasting and recording system enhancement
broadcasting, application-development, gstreamer, outsource
Fluendo awarded 6G-XR Open Call 3 grant to pioneer LCEVC-Powered holographic streaming
daas-vdi, gstreamer, codecs, lynx
Fluendo awarded SPIRIT Open Call 2 grant: Introducing AIVATAR
daas-vdi, gstreamer, codecs, fluendo-codec-pack, fluendo-ai-plugins, remote-desktop-coding-tools, raven, lynx
Privacy-preserving AI video surveillance with edge intelligence
video-surveillance, multimedia-edge-ai, gstreamer, events, fluendo-ai-plugins, raven
GStreamer Spring Hackfest 2025
gstreamer, codecs, browsers, events, open-source, owl
How Fluendo and Serenity* Star bring multimodal AI to business with computer vision
multimedia-edge-ai, raven
Low-latency marine streaming with Rust and GStreamer
broadcasting, application-development, gstreamer, outsource
Our latest GStreamer course for multimedia development
military, gstreamer, training
From a basic OpenCV script to a robust GStreamer-based solution
broadcasting, gstreamer, outsource, open-source
GStreamer course in Rust
broadcasting, application-development, training
Recasting and Recording System (RRS) a case study by Fluendo
broadcasting, application-development, gstreamer, outsource
Transforming ideas into AI-driven solutions: Join Fluendo at MWC 2025!
events, announcements
A glimpse of Fluendo at ISE 2025!
events, announcements
Fluendo expands audio capabilities with Dolby AC3 Professional decoder integration in our codec solutions
broadcasting, codecs, fluendo-codec-pack, ffmpeg-enabler, ffmpeg-enabler-dolby-professional
Your next big idea starts here: Join Fluendo at ISE 2025
events, announcements
Fluendo Becomes a Licensed Implementation Partner for Dolby Audio Professional
broadcasting, codecs, announcements, fluendo-codec-pack, ffmpeg-enabler, ffmpeg-enabler-dolby-professional
Next Generation Audio in MPEG-DASH - Personalized experience with Dolby AC-4, DTS-UHD and MPEG-H 3D Audio
broadcasting, gstreamer, events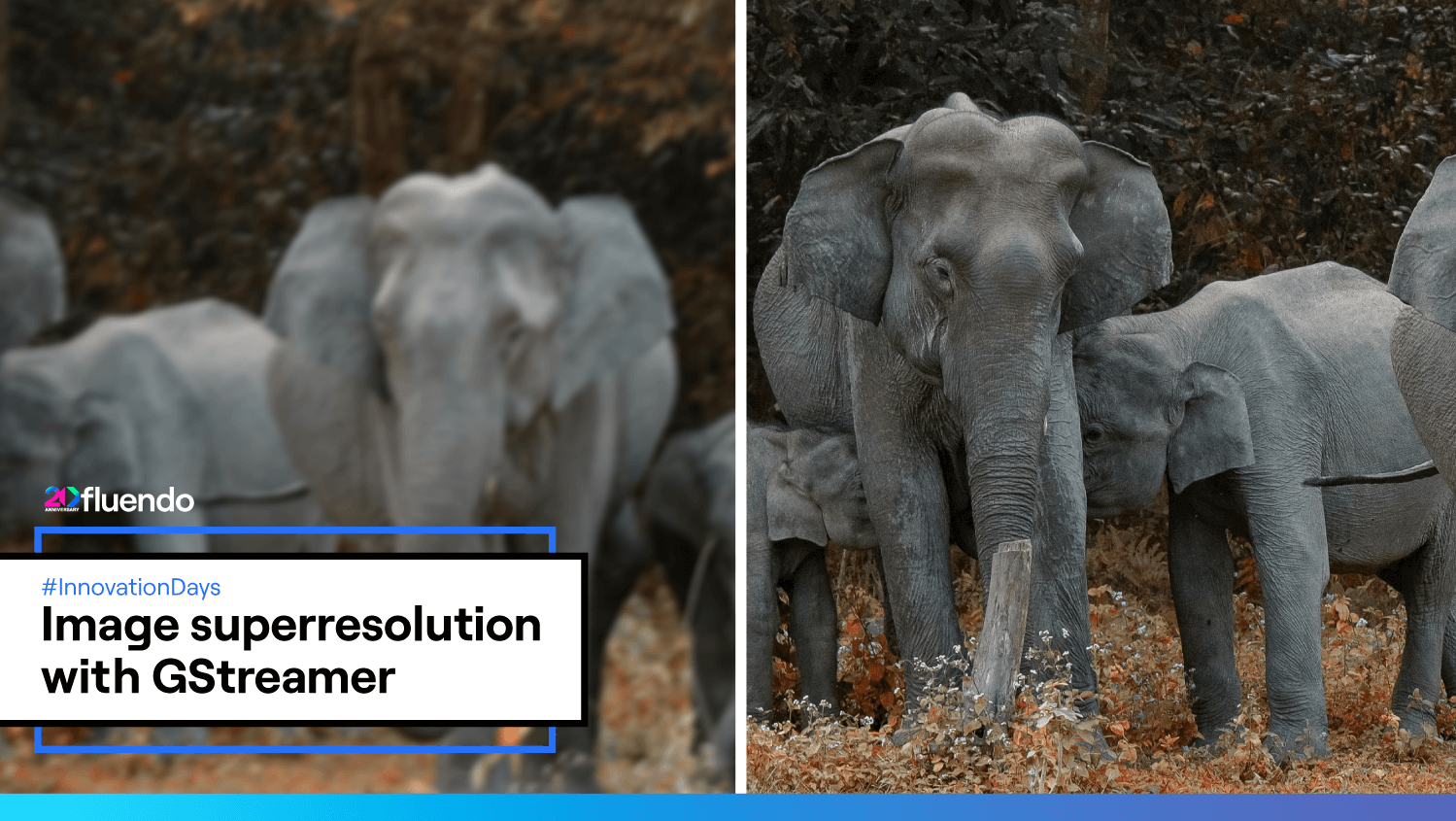
Image superresolution with GStreamer
broadcasting, video-surveillance, sports, multimedia-edge-ai, gstreamer, events, fluendo-ai-plugins, raven
Face Anonymization with GStreamer
broadcasting, video-surveillance, automotive, multimedia-edge-ai, gstreamer, events, fluendo-ai-plugins, anonymizer, raven
4K real-time face anonymization GStreamer plugin benchmark
broadcasting, video-surveillance, sports, education, multimedia-edge-ai, gstreamer, events, fluendo-ai-plugins, raven
Fluendo at GStreamer Conference 2024 in Montréal, Canada
gstreamer, events, open-source, owl
Automate quality control with AI-Based Flaw Detection from Fluendo
hardware-manufacturer, multimedia-edge-ai, guidance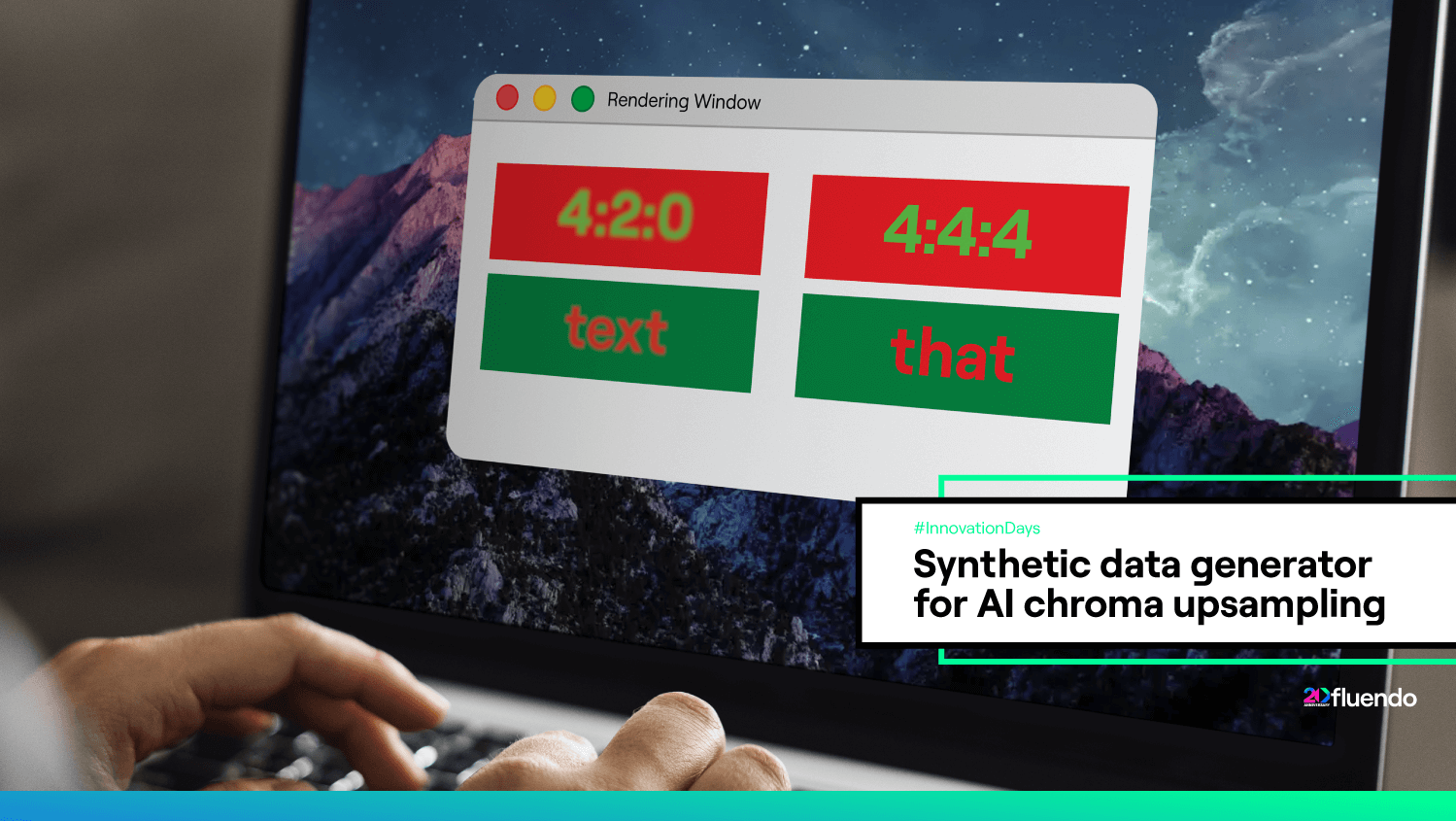
Synthetic data generator for AI chroma upsampling
daas-vdi, codecs, multimedia-edge-ai
GstWASM: The Open-Source project for GStreamer development in the Web
gstreamer, browsers, open-source, events, owl
Beyond numbers: a lesson in market research from Innovation Days
events
Next Stop: GStreamer Conference 2024 in Montréal, Canada
gstreamer, events, open-source, owl
MPEG-5 LCEVC in remote desktop streaming
daas-vdi, codecs, remote-desktop-coding-tools, lynx
How to cross-compile GStreamer for embedded systems
gstreamer, application-development, guidance
Upcoming Release 2.0.0 of Fluendo HW Codecs
daas-vdi, gstreamer, fluendo-codec-pack
Don’t miss Fluendo at IBC 2024 in Amsterdam!
broadcasting, events
Fluendo turns 20 years of coding the future of multimedia technology
announcements
Fluendo Open-Sources TTML Plugin to Empower the GStreamer Community
broadcasting, gstreamer, outsource, open-source, fluendo-codec-pack
Integrating Automated Testing in Multimedia
video-surveillance, gstreamer, codecs, outsource
Reducing video latency for GStreamer filters in digital microscopes
hardware-manufacturer, gstreamer, codecs, optimization
GStreamer Training for Application Development
gstreamer, application-development, training
Non-assisted scene calibration: an innovative impact on sports analysis
sports, multimedia-edge-ai, raven
Assisted scene calibration for sports analysis
sports, multimedia-edge-ai, raven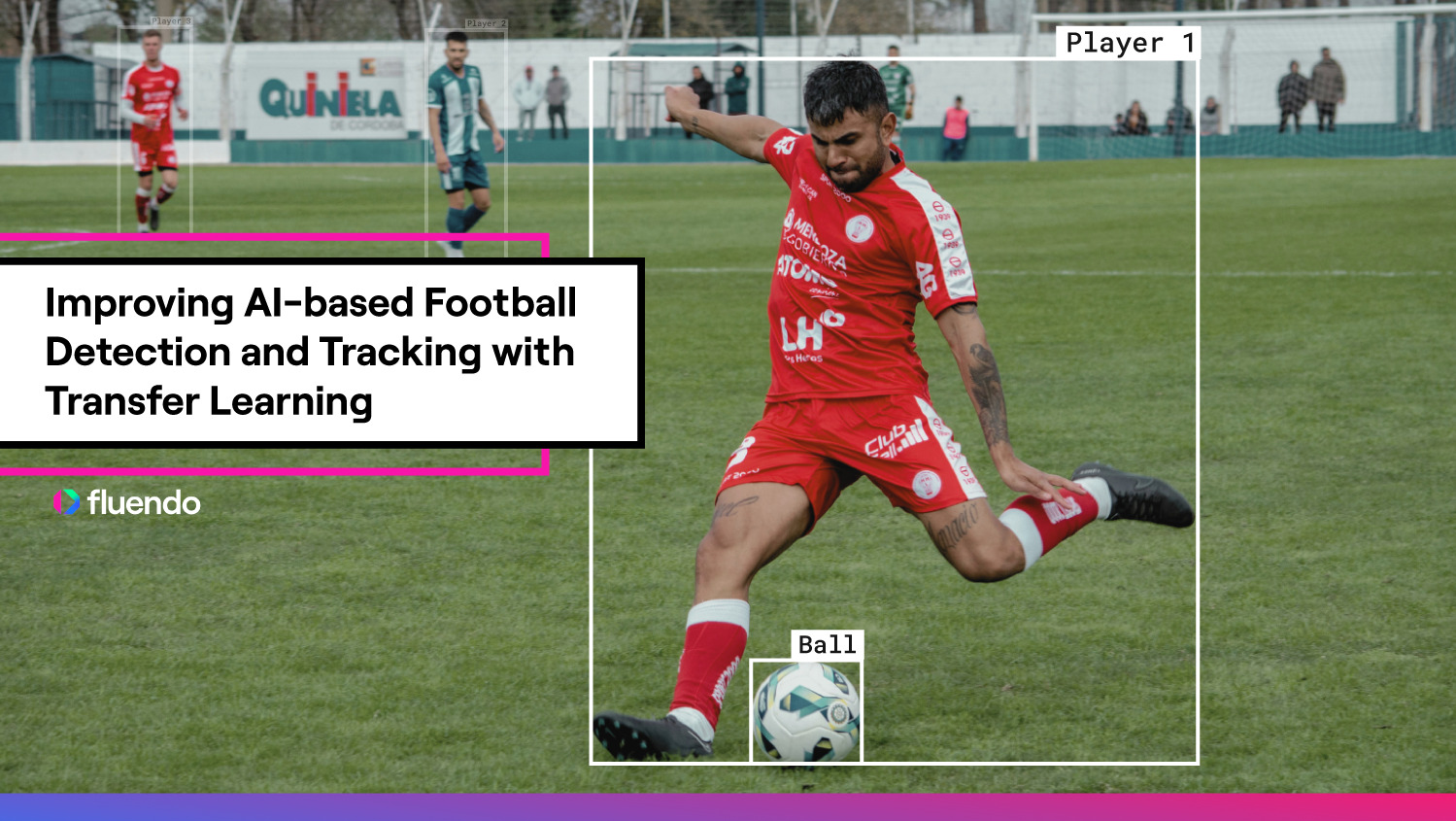
Improving AI-based Football Detection and Tracking with Transfer Learning
sports, multimedia-edge-ai, raven
GStreamer and Gaussianblur: Divide and conquer
hardware-manufacturer, gstreamer, embedded-devices, optimization
MWC 2024, here we go!
events
Navigating ISE 2024: A Remarkable Journey!
events
Barcelona Calling: Join Fluendo at ISE 2024!
events
GStreamer Training: from the first pipeline to handling threads
automotive, gstreamer, training
GStreamer development with Meson and VSCode
gstreamer, application-development, open-source
GStreamer Python Bindings for Windows
open-source
GStreamer Conference 2023 recap
gstreamer, open-source, events
How can LLM help us be more productive?
multimedia-edge-ai, events
HYPE: HYbrid Parallel Encoder
gstreamer, open-source, cheetah
Capture the best shots and metadata with our GStreamer PoC
unmanned-vehicles, gstreamer, codecs, application-development, guidance
Innovating Market Intelligence with AI and Data Analysis
multimedia-edge-ai, events
Improving on-device ML inference performance with compilers
ai, multimedia-edge-ai, raven
GstWASM: GStreamer for the web
gstreamer, browsers, open-source, events, owl
Born from an Idea: Unveiling Fluendo's Innovation Days
events
Next stop: GStreamer Conference 2023 in A Coruña!
gstreamer, open-source, events
Video codec optimized for desktop virtualization with LCEVC
daas-vdi, codecs, remote-desktop-coding-tools, lynx
Lights, camera, innovation! Fluendo on the road to the IBC 2023
broadcasting, events, remote-desktop-coding-tools
Enhanced AI models using synthetic data
sports, multimedia-edge-ai, raven
Putting closer Fluendo Hardware decoders to the GStreamer community memories
gstreamer, codecs, announcements, fluendo-codec-pack
GStreamer Training: Practical Approach for Beginners with Real-World Examples
gstreamer, codecs, application-development, training
Revolutionizing Video Management: a GStreamer Project on Windows
open-source
Open-source libva driver with vdpau backend powered by Fluendo
codecs, browsers, upstreaming, open-source
Don’t touch my memory
hardware-manufacturer, gstreamer, codecs, application-development, bug-fixing
Fluster: A framework for multimedia decoder conformance
codecs, gstreamer, ffmpeg, open-source
GStreamer HackFest Autumn 2022
gstreamer, events, open-source
Fluendo is heading to the IBC 2022!
broadcasting, events
ONEPLAY DVD Player Product Discontinuation
oneplay-dvd-player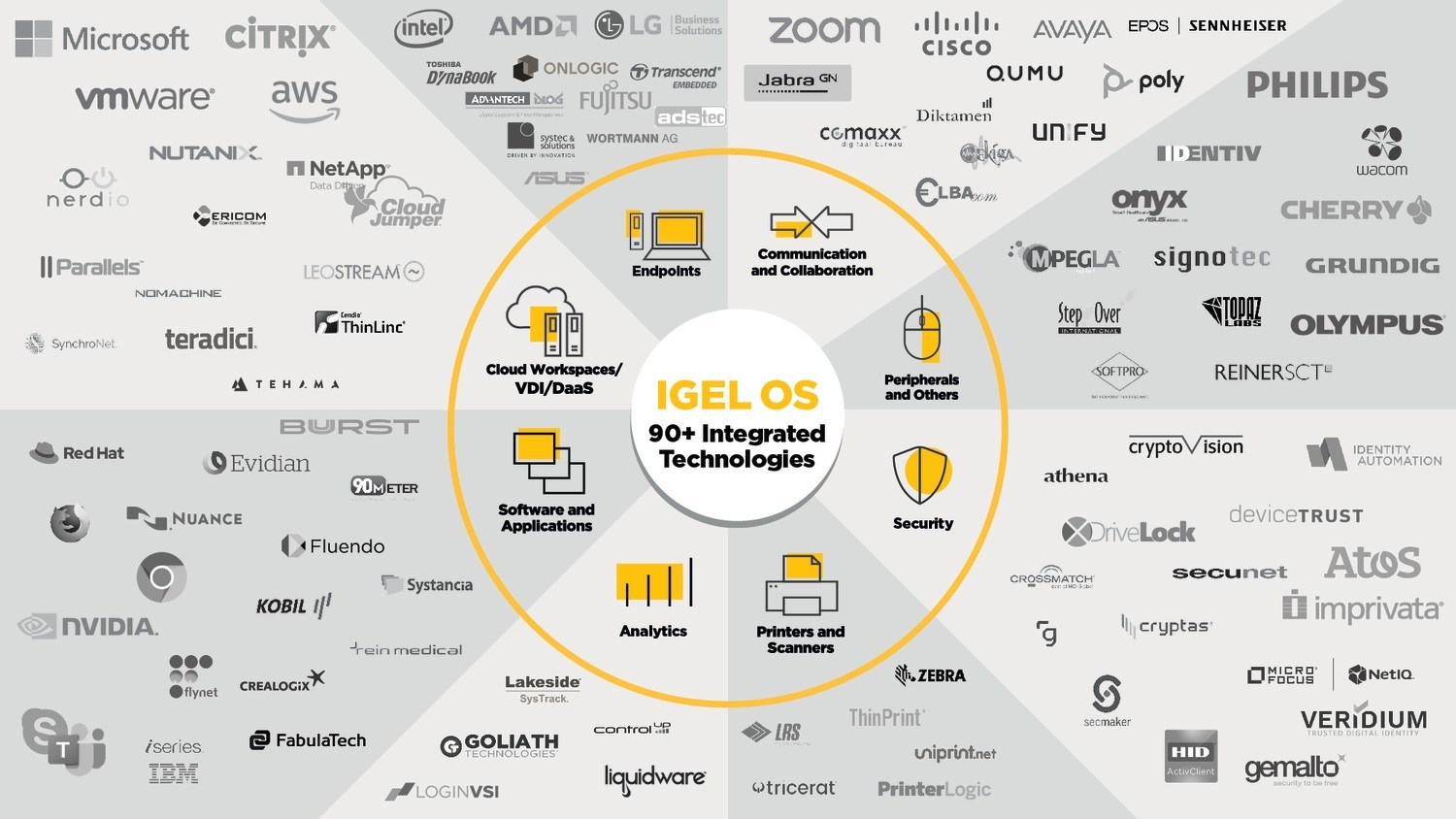
Fluendo Joins IGEL Ready Program
daas-vdi, announcements
GStreamer Conference 2019
gstreamer, events, open-source
GStreamer Spring Hackfest 2019
gstreamer, events, open-source
DLL INJECTION
application-development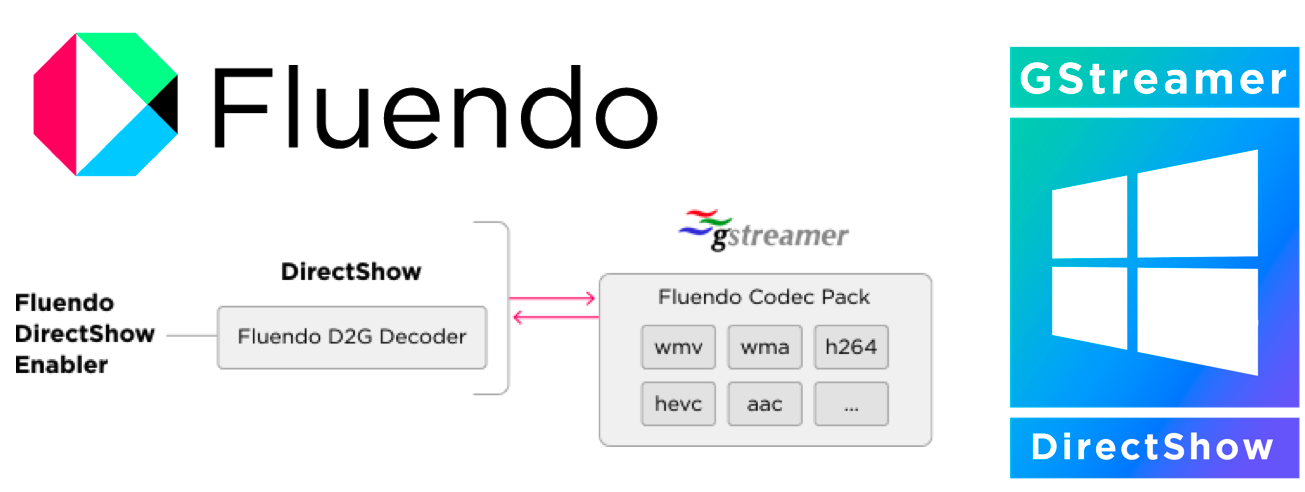
Introducing our bridge between DirectShow and GStreamer
gstreamer, directshow-enabler
Differences between GPL and LGPL when using licensed software
application-development, open-source, ffmpeg-enabler
Fluendo and SERAPHIC to showcase Android TV compliant HbbTV 2 SDK in IBC 2018
broadcasting, announcements, fluendo-hbbtv-sdk
How to use FFmpeg with GStreamer?
ffmpeg, gstreamer, ffmpeg-enabler
Fluendo and SERAPHIC develop fully compliant Digital TV browser solution for Linux and Android TV
broadcasting, fluendo-hbbtv-sdk
Citrix trusts the Fluendo Codec Pack to Enhance Multimedia Playback in their Networking and Virtualization Solutions
daas-vdi, announcements, fluendo-codec-pack
Douglas Brown spoke to Alex-Santos Fernández
daas-vdi, fluendo-codec-pack
Fluendo and SERAPHIC showcase fully compliant HbbTV 2.0.1 and Freeview Play solutions
broadcasting, gstreamer, browsers, fluendo-hbbtv-sdk
Fluendo, golden sponsor at the GStreamer conference
gstreamer, open-source, events
IGEL: A Superb Multimedia Partnership since 2009
daas-vdi, announcements, fluendo-codec-pack
HP trusts in the Fluendo Codec Pack for their new line of Linux-based Thin Clients
daas-vdi, announcements, fluendo-codec-pack
Codeweavers adds Fluendo’s ONEPLAY suite to its portfolio
software-services, oneplay-codec-pack
Fluendo joins the GENIVI Alliance to develop multimedia solutions in the automotive sector
automotive, announcements
Fluendo becomes an MPEG-DASH Licensee
broadcasting, gstreamer, codecs, announcements, fluendo-codec-pack
Fluendo provides legal multimedia software to a million thin clients
fluendo-codec-pack
Terra Soft today released Yellow Dog Linux v6.0 for Sony PS3, Apple G4/G5, and IBM System p. Built upon the CentOS foundation
operating-system-producer, announcements, fluendo-codec-pack
Fluendo increases sales by 9.3% in Q1 of 2016
announcements, oneplay-codec-pack
Fluendo announces turnover of 2,1M€ in 2015
announcements, oneplay-codec-pack
Fluendo Wins the Award 2015 NAB Best of Show for LongoMatch
announcements, events, longomatch
GStreamer Element in RDK Stack Opens New Possibilities for OEMs
gstreamer, codecs, oneplay-codec-pack
Despite Hype, HEVC Not Yet Ubiquitous
codecs, fluendo-codec-pack
Fluendo Announces Partnership With The Fraunhofer Heinrich Hertz Institute
announcements, oneplay-codec-pack
Fluendo Releases a New Version of its DVD Player
oneplay-dvd-player
Fluendo is proud to announce its Codec Pack 18, now supporting GStreamer 1.0 for several Linux Distributions
gstreamer, fluendo-codec-pack
GStreamer SDK Now Offers Support for Developing Multimedia Playback on Android
gstreamer
Fluendo Launches Moovida Universe, a Media Center Specially Optimized for the Second-Generation AMD A-Series APU
moovida
Fluendo Joins The Linux Foundation
announcements
Fluendo Attends GStreamer Conference to Present the Time Shifting Element
gstreamer, events, open-source
Fluendo Codec Pack Release 15: Now Supporting Hardware Acceleration for AMD XvBA
codecs, fluendo-codec-pack
Fluendo releases Moovida 2.1.0: Better Multimedia Management and Improved User Experience
moovida
Fluendo Joins Open Invention Network as a Licensee
announcements
Fluendo Releases SMD Elements for Intel® CE Media Processors
gstreamer
Fluendo Launches Moovida Pro, the Professional Media Center for Windows Operating Systems
moovida
Fluendo Codec Pack Release 11: Keeping Up with Technologies Fast Pace
gstreamer, codecs, fluendo-codec-pack
Fluendo Launches the DVD Player for Windows Operating Systems.
gstreamer, oneplay-dvd-player
Fluendo Launches the Ultimate Media Center for Linux Operating Systems
oneplay-dvd-player, fluendo-media-center
Fluendo announces Multimedia Solutions for Intel Moorestown Platform
codecs, fluendo-codec-pack
Fluendo Group Concerned over EC threat to open-source investment

Fluendo Launches the Long Awaited DVD Player for Open Solaris
oneplay-dvd-player
Fluendo Codec Pack Release 10: One Step Ahead to Reaching Excellence in Multimedia.
fluendo-codec-pack
Fluendo Launches the Long Awaited DVD Player for Linux, a Global Solution Built on GStreamer Multimedia Framework
gstreamer, oneplay-dvd-player
Fluendo announces the last release of its multimedia codec pack available on OpenSolaris, the open OS by Sun Microsystems
fluendo-codec-pack
Fluendo presents multimedia solution on Moblin, optimized for Intel® Atom™ processor at OSiM World 2008, Berlin
fluendo-codec-pack
Fluendo Codec Manager introduced in Mandriva Spring 2008 to help users enjoy their media files
operating-system-producer, fluendo-codec-pack
Fluendo co-founds The GNOME Mobile And Embedded Initiative
mobile, announcements
Fluendo announces Windows Media and MPEG codec support for GNU/Linux and Solaris
codecs, fluendo-codec-pack
Fluendo announces free MP3 audio decoding for GNU/Linux and Unix
codecs, fluendo-codec-pack
Fluendo announces public GStreamer plugin repository
gstreamer, open-source
Three new companies join the GNOME Foundation's Advisory Board
announcements, open-source
Nokia works with Fluendo on improving the GStreamer multimedia framework
gstreamer, announcements
Fluendo's investments in GStreamer lead to increased adoption
gstreamer, open-source
Fluendo funds Xiph.org for Vorbis and Theora RTP specifications
open-source
Fluendo announces official launch of the Flumotion Streaming Server project
open-source
Fluendo, GStreamer-based streaming media company, launched
gstreamer, announcements